
Le guépard est très rapide … oui mais combien ?
Le guépard (Acinonyx jubatus) est considéré comme l’animal terrestre le plus rapide, mais en fait on sait assez peu de ses performances réelles lors de la chasse. Wilson, A. M., et al. (2013) ont mesuré avec un collier GPS et un accéléromètre la dynamique locomotrice et le succès de la prédation de 367 sprint de chasse Guépards au Botswana. Une vitesse maximale de 25.9 m s−1 (93 km h−1) a été enregistrée mais la plupart des chasses se font à des vitesses plus modérées. Par contre ces chercheurs ont enregistré des accélérations positives et négatives en avant et latérales, ainsi que des puissances par rapport la masse corporelle parmi les plus élevées pour un animal terrestre. C’est peut-être la première série de données aussi précises de la dynamique de chasse d’un grand prédateur dans son environnement naturel.

Fig 1: a) Le guépard avec le collier GPS-accéléromètre et les adaptations anatomiques qui contribuent à sa performance.Notez les griffes non-rétractiles c) et la décélération intense en d) b) g: gravitation v2 r−1 V2r = accélération centripète, a =est l’accélération résultante [img] source Wilson, A. M., et al. (2013)
Le déplacement du Guépard n’est pas rectiligne ni uniformément accéléré…
Wilson, A. M., et al. (2013) (Les membres Expériment@l peuvent obtenir ces articles…) ont mesuré avec un collier radio pesant 340 g alimenté par des panneaux solaires,comportant un GPS, trois accéléromètres (X, Y, Z) et trois gyroscopes (trois angles de rotation) 367 sprints de chasse chez trois femelles et de deux mâles.
Les données (fig 2.) montrent des périodes de déplacement tranquille et des accélérations très rapides lors des sprints finaux, notamment des accélérations latérales très fortes (fig 2b) où le guépard doit exercer une force centripète (les modèles naifs des élèves leur feront peut-être dire qu’il lutte contre la force centrifuge ?)
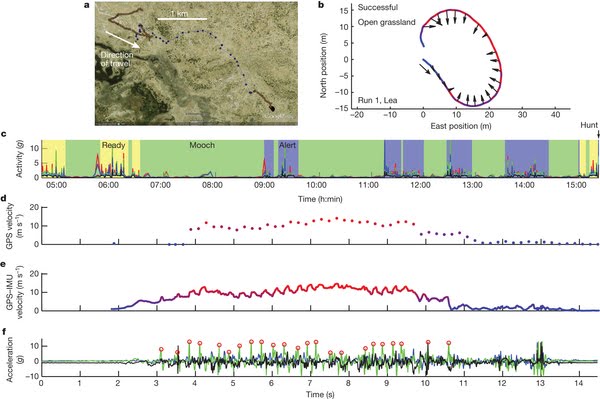
Figure 2 : Trace GPS d’un guépard durant 11h (les données GPS sont disponibles en tant qu fichier Google Earth dans la Supplementary File 1) Chaque marque circulaire indique une position établie par GPS. Les couleur indiquent le type de mouvement du Guépard : détails dans Supplementary info) [img] source Wilson, A. M., et al. (2013)
Des données authentiques disponibles à chacun
Wilson, A. M., et al. (2013) nous proposent un exemple de leurs données GPS en tant qu fichier Google Earth dans la Supplementary File 1 ( j’ai du renommer en .KML le fichier pour qu’il soit reconnu)
-
- Supplementary Data (8.1 KB)
- This KML (Google Earth) file contains the GPS positions of the cheetah over an 11 hour period. To view, Google Earth must first be installed from www.google.com/earth/index.html, then double click on the file to open it. To see the cheetah’s movement through time you can slide the bar in the top left. The markers are colour coded by collar state such that Alert:blue, Mooch:green, Ready:yellow, Chase:red.
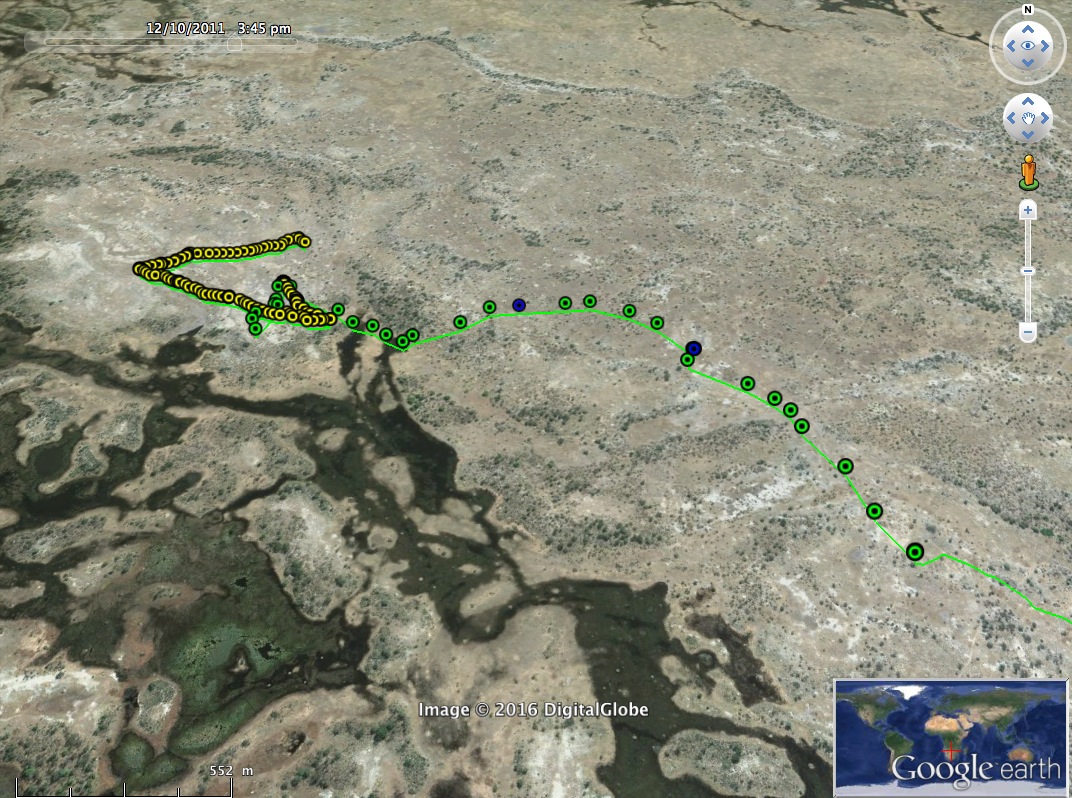
Figure 3 : Trace GPS d’un guépard durant 11h affichées dans Google Earth à partir de la Supplementary File 1) source Wilson, A. M., et al. (2013)
Ainsi on peut extraire des données réelles de position et d’accélération, situer le guépard à différents moments, identifier des fragments de tracé qui sont (presque) rectilignes ou de vitesse constante voir dériver des vitesses, et des accélérations qu’on peut comparer aux accélérations enregistrées par les accéléromètres.
Le MRUA c’est bien, mais ça reste assez artificiel pour les élèves …
Evidemment on ne peut pas confronter les élèves à des modèles de mouvement complexes construits par des chercheurs qui mêlent accélérations variables, linéaires et/ou centripètes à partir de données issues de mesures discrètes.
Est-ce pour autant impossible de partir de ces données ou de conduire les élèves à sélectionner un sous-ensemble de données authentiques bien choisies … pour les rendre capables d’utiliser le modèle MRUA et voir comment il les aide à mieux comprendre le monde qui les entoure ? Le PER nous y incite en effet » problématiser des situations, de mobiliser des outils et des démarches, de tirer des conclusions fondées sur des faits, notamment en vue de comprendre le monde naturel » et le plan d’études du secondaire II aussi « aperçu des concepts fondamentaux de la Physique et de leur application aux phénomènes naturels »
Peut-être que selon les programmes et les options certains enseignant voudront p. ex extraire un segment de droite de la trace GPS / son temps et en mesurer la vitesse ? ou confronter une mesure sur l’ensemble d’un long tronçon selon le modèle MRU aux vitesses que les chercheurs donnent ? ou mesurer l’accélération latérale en dérivant la position dans une partie du trajet où il poursuit sa proie ?
Ou au contraire montrer que les lois de Newton permettent d’expliquer pourquoi l’animal ne peut pas freiner instantanément ? D’expliquer pourquoi c’est un problème de tourner si on est plus lourd …
Y aurait-il d’autres usages ?
Eventuellement exploiter ces données pour vérifier / mettre en défaut cette conception naïve classique répertoriée la l’AAAS Force and Motion
| FMM107 | If an object is slowing down, a force that was moving it forward must be decreasing (Clement, 1982; Watts & Zylbersztajn, 1981). |
Des statistiques de chasse: c’est pas la vitesse, c’est la décélération et l’accélération latérale …
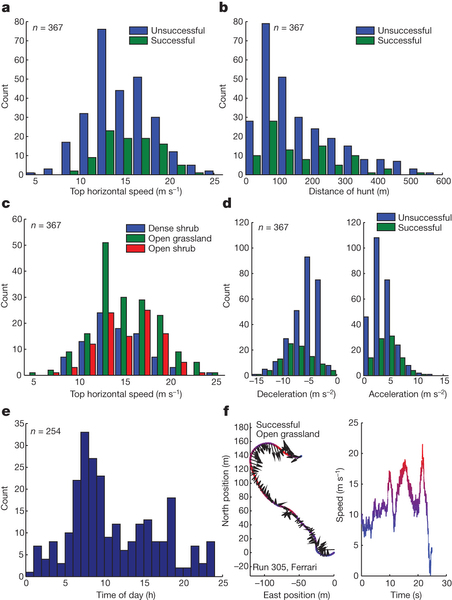
Les chercheurs ont établi des statistiques montrant que le guépard n’a réussi à atteindre sa proie que dans 25% des cas. Sur la figure 4, on voit que le terrain joue un certain rôle : les auteurs indiquent que le félin ne doit pas tellement son succès à ses pointes de vitesse, mais plutôt à sa capacité de décélération puisqu’il ralentit à l’approche de sa proie plus légère qui fuit en zig-zag (la proie faut typiquement moins de 50Kg contre 70 pour le guépard) c’est alors l’accélération latérale qui est décisive : réussir à tourner assez vite alors qu’un prédateur plus rapide serait emporté par son élan lors d’un écart de la proie.
Successful hunts involved greater deceleration on average (−7.5 m s−2 versus −5.5 m s−2; P < 0.05; Fig. 4d), but there was no significant difference in peak acceleration (Fig. 4d), distance travelled (Fig. 4b) number of turns (6.7 versus 6.5) or total turn angle (347° versus 260°) (generalized linear mixed model (GLMM); Methods). This indicates that outcome was determined in the final stages of a hunt rather than hunts being abandoned early to save energy or reduce risk of injury, and the higher deceleration values may reflect actual prey capture. Wilson, A. M., et al. (2013)
Et en français ?
On peut trouver de très bonnes ressources :
Sources
- Wilson, A. M., Lowe, J. C., Roskilly, K., Hudson, P. E., Golabek, K. A., & McNutt, J. W. (2013). Locomotion dynamics of hunting in wild cheetahs. Nature, 498(7453), 185‑189. http://doi.org/10.1038/nature12295
- Savatier, F. (2013, juin 25). La course ralentie du guépard [Pour la Science]. http://www.pourlascience.fr/ewb_pages/a/actu-la-course-ralentie-du-guepard-31620.php
- La course du guépard dans les ami-mots